

ระบบการควบคุมเครื่องจักรและระบบอัตโนมัติสำหรับโรงพิมพ์และโรงงานอุตสาหกรรม โดยใช้พีแอลซีและซอฟแวร์ (ตอนที่ 7)
(Machine control system and Automation system for Printing houses and Industrial plants using PLC and Software Part 7)
โดย วิรัช เดชาสิริสิงห์ ผู้เชี่ยวชาญด้านระบบโรงงานอัตโนมัติและการลดต้นทุนในโรงงานและกระบวนการผลิต
ในเนื้อหาเล่มที่แล้วได้กล่าวนำถึง Displacement Sensors แบบกว้าง ๆ ซึ่งในเล่มนี้จะได้อธิบายในรายละเอียดต่าง ๆ ของเซนเซอร์ชนิดนี้ในเชิงลึกในลำดับต่อไป
หลักการทำงานและการจำแนกประเภท DISPLACEMENT SENSORS
เซนเซอร์มีหลายประเภท การเลือกใช้ขึ้นอยู่กับองค์ประกอบที่ใช้ เช่น Optical Displacement Sensors, Linear Proximity Sensors และ Ultrasonic Displacement Sensors การเลือกอุปกรณ์ที่เหมาะสมที่สุดตามการใช้งาน ความแม่นยำที่ต้องการ และสภาพแวดล้อมการใช้งานเป็นสิ่งจำเป็นอย่างยิ่ง
1. Optical Displacement Sensors
เซนเซอร์ประเภทนี้ใช้ระบบการวัดแบบสามเหลี่ยม (Triangulation measurement system) โดยเซนเซอร์บางตัวใช้หลักการ PSD (Position Sensitive Detector) และบางตัวใช้เซนเซอร์รับภาพแบบ CCD และ CMOS เป็นตัวรับแสง
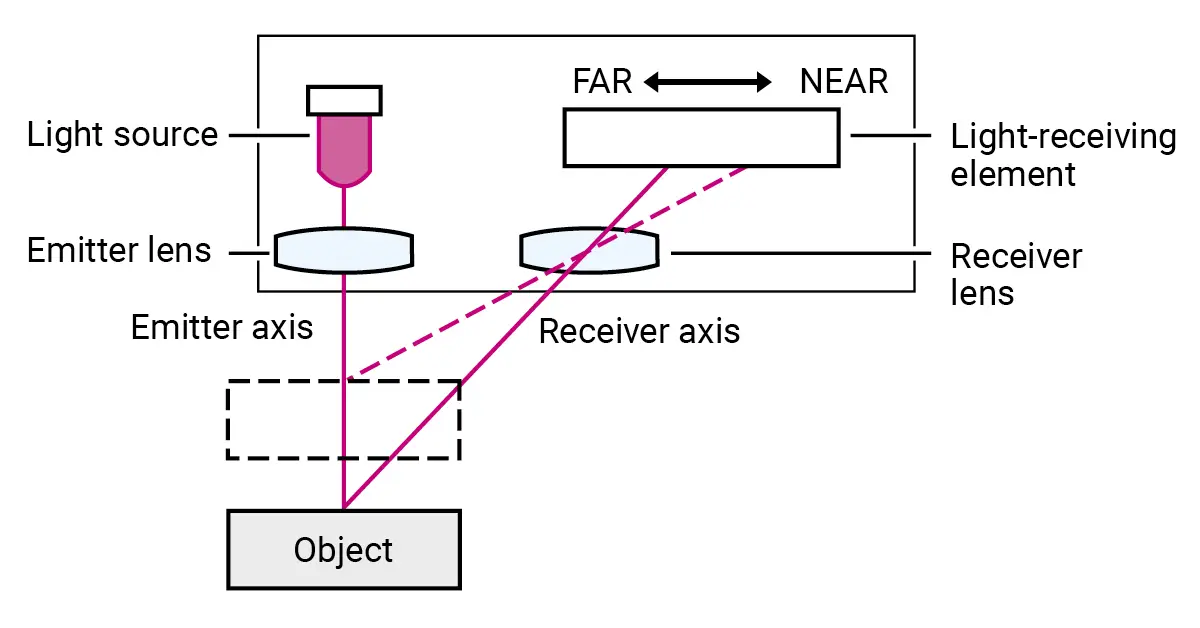
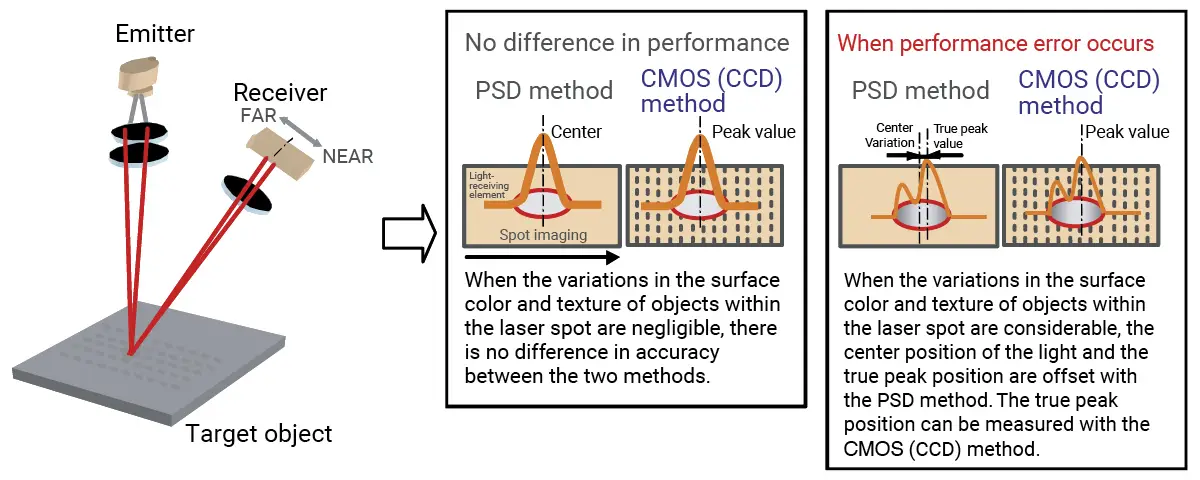
หลักการวัดระยะแบบ PSD (Position Sensitive Detector)
รวมแสงจากแหล่งกำเนิดแสงด้วยเลนส์ แล้วยิงลำแสงไปสู่วัตถุ แสงสะท้อนกลับจากวัตถุเข้าสู่เลนส์รับ แล้วส่งไปยังอุปกรณ์ตรวจจับตำแหน่งแบบหนึ่งมิติ (PSD) หากตำแหน่งของวัตถุ (ระยะห่างจากอุปกรณ์วัด) เปลี่ยนไป ตำแหน่งรูปแบบของภาพบน PSD จะแตกต่างกันและความสมดุลของเอาต์พุต PSD ทั้งสองก็จะเปลี่ยนไป
หลักการวัดระยะแบบ CMOS และ CCD
เมื่อเทียบกับเซนเซอร์ที่ใช้หลักการแบบ PSD เซนเซอร์ที่ใช้ CMOS หรือ CCD เป็นตัวรับแสง ให้การวัดระยะที่แม่นยำกว่า โดยไม่ได้รับผลกระทบจากสีและลักษณะพื้นผิวของวัตถุ
เซนเซอร์รับภาพแบบ CMOS หรือ CCD จะตรวจจับปริมาณแสงในแต่ละพิกเซล แล้วแปลงเป็นระยะห่างเมื่อมีลำแสงสะท้อนกลับจากพื้นผิวของวัตถุไปยังตัวรับแสง
• เซนเซอร์รับภาพแบบ CMOS (Complementary Metal Oxide Semiconductor) มีลักษณะเป็นเซนเซอร์ Pixel ซึ่งทำหน้าที่ในการรับแสงและแปลงสัญญาณ มีข้อได้เปรียบเรื่องของความเร็วและการใช้พลังงานที่น้อย
หลักการวัดระยะตามรูปแบบการสะท้อน
หลักการวัดระยะแบบการสะท้อนปกติ จะเกิดแสงสะท้อนแบบ Specular เมื่อลำแสงเลเซอร์ถูกปล่อยออกไปยังวัตถุ โดยทำมุมทะแยง แล้วสะท้อนกลับมายังตัวรับข้อมูล จะมีค่ามุมตกกระทบเท่ากับมุมสะท้อนกลับ จึงทำให้เหมาะกับชิ้นงานโปร่งใส โลหะ หรือ วัตถุที่มันเงามากเป็นพิเศษ มีความละเอียดมากกว่าแบบ Diffuse แต่มีช่วงการวัดที่แคบกว่า แบบ Diffuse
หลักการวัดระยะแบบการสะท้อน Diffuse
ลำแสงเลเซอร์จะฉายไปยังวัตถุเป้าหมายในแนวตั้งฉากลงบนพื้นผิวของวัตถุ และรับแสงสะท้อนกลับแบบกระจาย จะใช้หัวเซนเซอร์ที่เอียงทำมุมเพื่อรับแสงที่สะท้อนกลับมายังตัวรับข้อมูล ช่วยให้วางหัวเซนเซอร์ไว้ห่างจากวัตถุได้ จึงสามารถวัดค่าระยะทางไกล หรือพื้นที่การวัดที่กว้างได้ แต่ไม่เหมาะกับชิ้นงานโปร่งใส หรือ วัตถุที่มันเงา เนื่องจากวัตถุเหล่านั้นสะท้อนแสงได้ดีเป็นพิเศษ
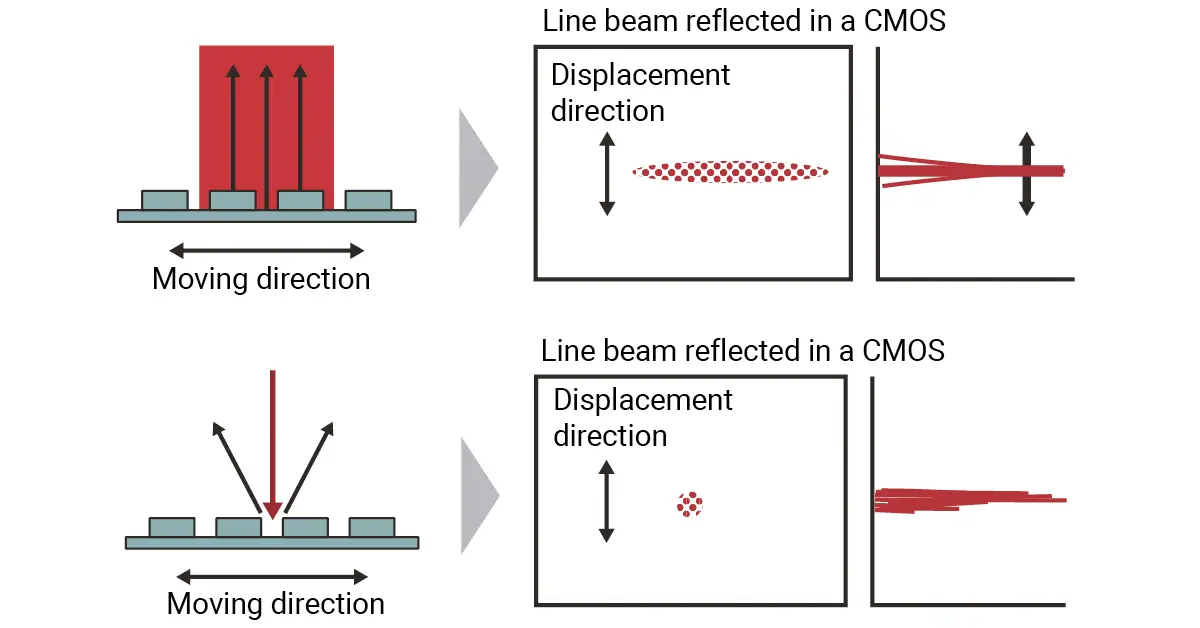
หลักการวัดระยะแบบ Line Beams และ Spot Beams
- Line Beam Model เซนเซอร์รุ่นนี้วัดระยะเฉลี่ยภายในลำแสงเลเซอร์แบบ Line Beam ให้การวัดที่เสถียร โดยไม่ได้รับผลกระทบจากการกระแทกหรือความไม่สม่ำเสมอบนพื้นผิวของวัตถุ
- Spot Beam Model เซนเซอร์รุ่นนี้ใช้แสงที่ส่องเคลื่อนที่เจาะจงเป็นจุด ทำให้อ่อนไหวต่อการกระแทก หรือความไม่สม่ำเสมอบนพื้นผิวของวัตถุ
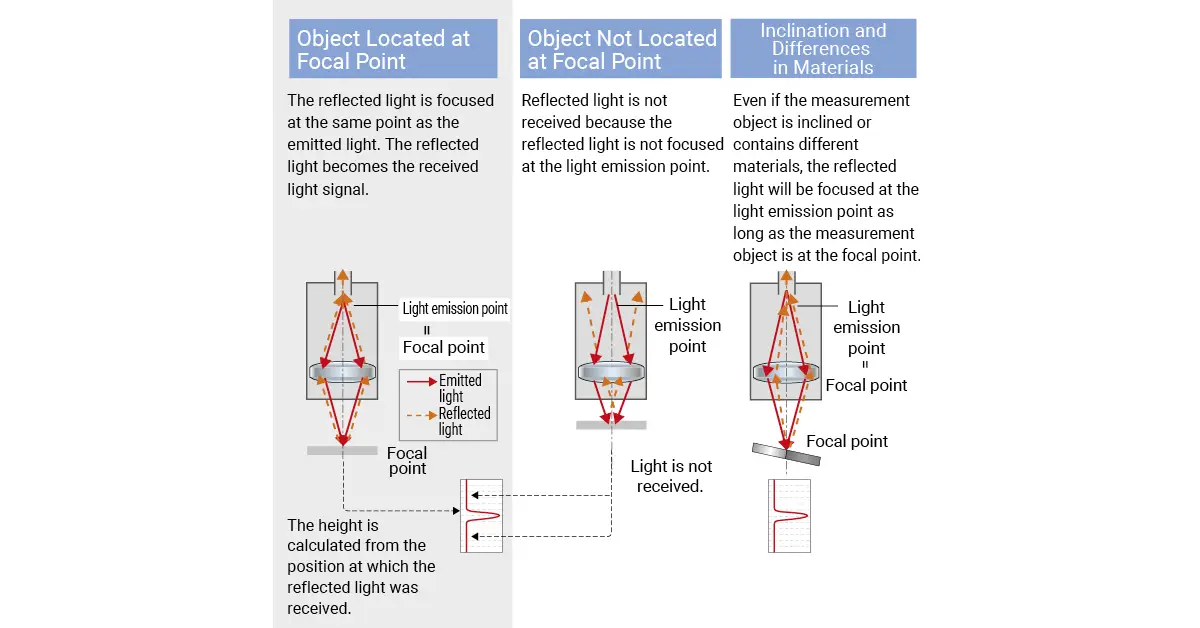
หลักการวัดระยะแบบ Confocal
เซนเซอร์แบบคอนโฟคอล โดยอาศัยหลักการทำงานของเลเซอร์ให้แสงที่เป็นแบบจุดและมีรูรับแสงที่มีขนาดเล็กมาก แสงที่ปล่อยออกมาและแสงที่สะท้อนกลับจะอยู่ในตำแหน่งเดียวกัน จึงสามารถกำจัดแสงนอกโฟกัสได้ ส่งผลให้มีความคมชัดของภาพมากขึ้นกว่าเซนเซอร์รุ่นอื่น ๆ ทำให้สามารถวัดค่าที่มีความละเอียดสูง ตรวจสอบความลึก ความสูงของพื้นผิวได้
ตามหลักการการวัดระยะแบบ Confocal เลเซอร์จะให้แสงที่ปล่อยออกมาและแสงที่สะท้อนกลับจะอยู่ในตำแหน่งเดียวกัน และสามารถกำจัดแสงที่อยู่นอกเหนือโฟกัสได้ (light waveform ) จะส่งผลให้เกิดความคมชัดของภาพมากกว่าเซนเซอร์รุ่นอื่น ๆ
หลักการวัดระยะแบบ White Light Confocal
เซนเซอร์พิเศษแบบใช้เทคนิค White Light Confocal เพิ่มประสิทธิภาพการตรวจวัดวัตถุที่มีความแตกต่างกันในแง่พื้นผิวไม่ว่าจะเป็นผิวหยาบ ผิวสะท้อนแสง
หลักการคือการใช้แสงในย่านสีต่าง ๆ มากมาย รวมกันเป็นแสงสีขาวในการตรวจวัด เมื่อยิงไปสู่วัตถุ แสงแต่ละสีจะตอบสนองต่อผิวสัมผัสต่างกัน ซึ่งช่วยให้สามารถคำนวณระยะห่างจากหัวเซนเซอร์ไปยังวัตถุที่วัดได้โดยใช้สีของแสงสะท้อน ให้การวัดที่แม่นยำแม้ว่าพื้นผิววัสดุหรือรูปทรงจะมีความแตกต่างกัน
เซนเซอร์วัดระยะแบบ White Light Confocal จะสามารถป้องกันสัญญาณรบกวนได้ดีกว่าระบบการวัดแบบสามเหลี่ยมและเซนเซอร์คอนโฟคอลรุ่นก่อน
• White Light Confocal เป็นเซนเซอร์ชนิดพิเศษ โดยใช้เทคนิค White Light Confocal ที่ช่วยเพิ่มประสิทธิภาพการตรวจวัดวัตถุที่มีความแตกต่างกัน ทั้งผิวหยาบ ผิวสะท้อนแสง ผิวที่มีความลาดเอียง
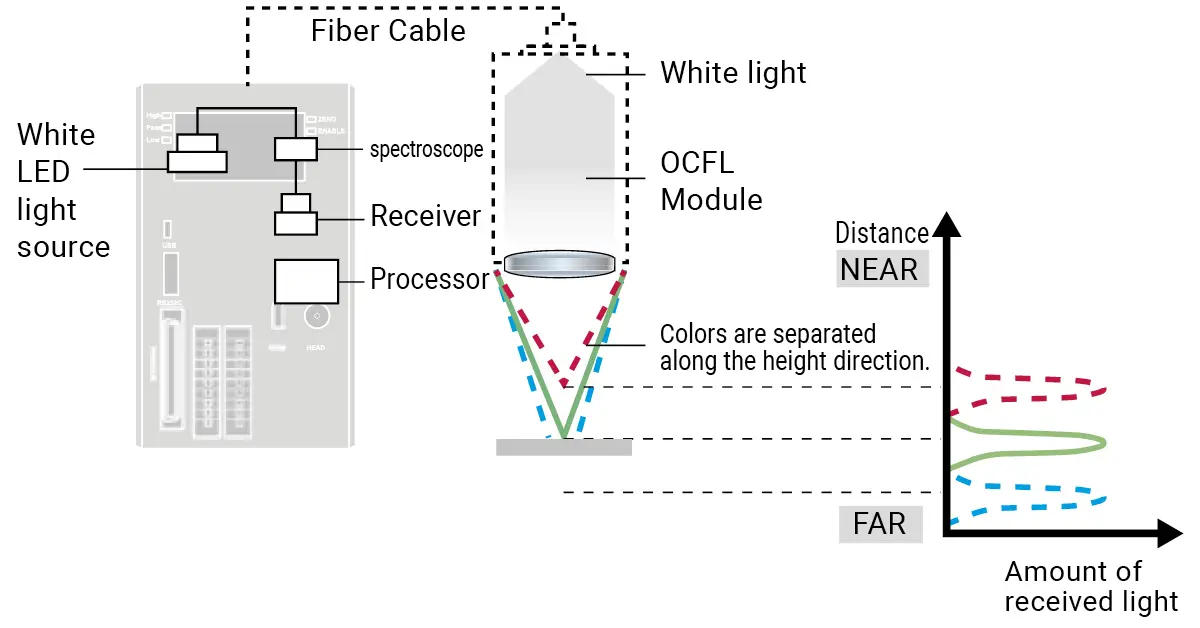
OCFL Module ประกอบด้วยชุดเลนส์พิเศษที่พัฒนาโดย OMRON ที่เปลี่ยนจุดโฟกัสสีสะท้อนของแสงสีขาวแต่ละสี (เช่น ความยาวคลื่น) เส้นผ่านศูนย์กลางของจุดจะเท่ากันในทุกตำแหน่งภายในช่วงการวัด ด้วยเทคโนโลยีการผลิตเลนส์ที่มีความแม่นยำสูง ช่วยให้ได้โครงสร้างเลนส์ที่มีขนาดเล็กมาก และไม่ต้องใช้กลไกขับเคลื่อน
หลักการวัดระยะแบบ Light-cutting
แสงเลเซอร์จะฉายอย่างทั่วถึงบนวัตถุ เพื่อวัดรูปร่างหน้าตัดของชิ้นงานนั้น ลำแสงเลเซอร์จะมีลักษณะเป็นแถบกว้างเพื่อฉายบนวัตถุอย่างครอบคลุม และมีตัวรับแสงสะท้อนจากวัตถุแบบ CCD รูปทรงของวัตถุจะถูกสร้างขึ้นตามหลักการวัดระยะแบบสามเหลี่ยม แต่สามารถวัดแกน X และ Z พร้อมกันได้ โดยไม่จำเป็นต้องย้ายเซนเซอร์หรือวัตถุ
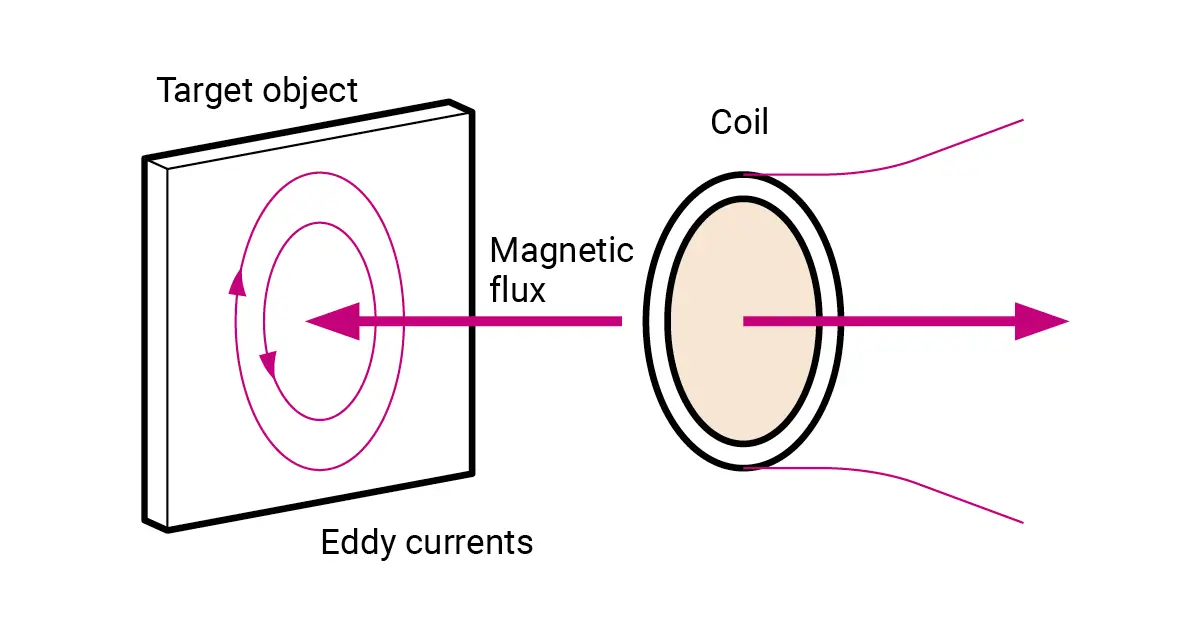
2. Linear Proximity Sensors
เซนเซอร์ชนิดนี้จะอาศัยหลักการทำงานจากสนามไฟฟ้าและสนามแม่เหล็ก บริเวณส่วนหัวของเซนเซอร์จะมีสนามแม่เหล็กซึ่งมีความถี่สูง โดยได้รับสัญญาณมาจากวงจรกำเนิดความถี่ เมื่อมีวัตถุหรือชิ้นงานที่เป็นโลหะ เข้ามาอยู่ในบริเวณที่สนามแม่เหล็กสามารถส่งไปถึง จะทำให้เกิดการเปลี่ยนแปลงค่าความเหนี่ยวนำ แล้วทำการส่งสัญญาณควบคุมออกมา
สามารถตรวจจับวัตถุทั้งในระยะใกล้และไกลได้อย่างรวดเร็ว แม่นยำ เช่น การตรวจจับชิ้นงานที่ไม่สมบูรณ์ ตรวจจับสิ่งของ ตรวจจับความเร็วรอบ ตรวจจับระดับน้ำในถังพลาสติก ตรวจจับกล่องเพื่อนับจำนวน เป็นต้น
อีกทั้งเซนเซอร์ชนิดนี้ยังมีความทนทาน สามารถทำงานได้ในช่วงอุณหภูมิที่กว้าง หรือแม้อยู่ในสภาวะที่มีการรบกวนของแสงและเสียงได้
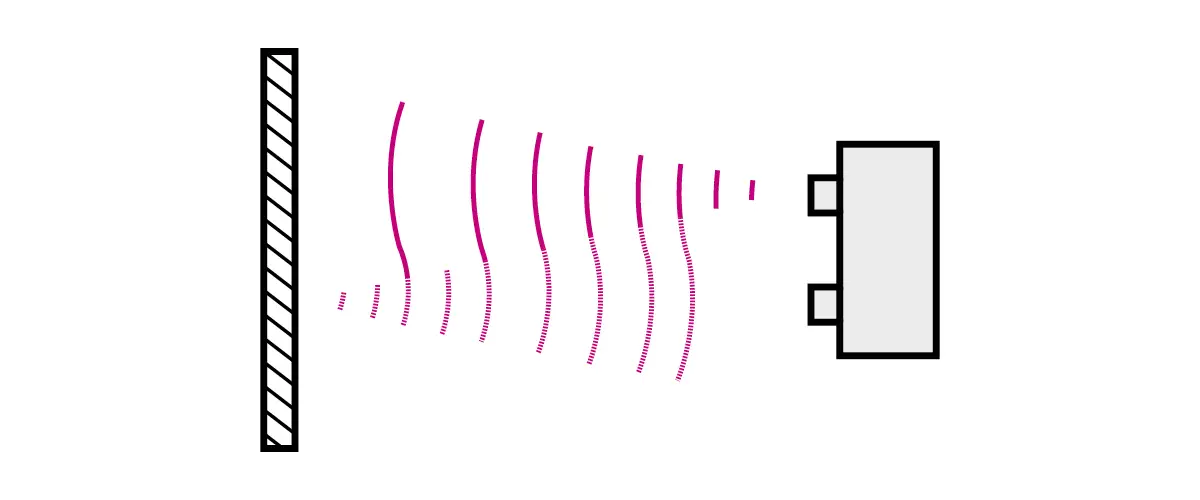
3. Ultrasonic Displacement Sensors
เซนเซอร์ชนิดนี้ใช้หลักการสะท้อนของคลื่นความถี่เสียงในการตรวจจับวัดถุต่าง ๆ โดยการส่งคลื่นความถี่เสียงในช่วง Ultrasound ไปยังวัตถุหรือชิ้นงาน แล้วรับคลื่นที่สะท้อนกลับจากวัตถุนั้นมาคำนวณหาค่าระยะทาง โดยการคำนวณความสัมพันธ์ระหว่างเวลาในการเดินทางของคลื่น กับความเร็วของเสียง
ด้วยหลักการดังกล่าวทำให้สามารถนำ Ultrasonic Displacement Sensors มาประยุกต์ใช้งานในรูปแบบต่าง ๆได้อย่างมากมาย ตรวจจับวัตถุได้หลากหลาย และสภาพแวดล้อมต่าง ๆ ได้ดี เนื่องจากคลื่น Ultrasound สามารถเดินทางผ่านตัวกลาง เช่น อากาศ ก๊าซ ของเหลว หรือ ของแข็งได้
4. Contact Displacement Sensors
เซนเซอร์ชนิดนี้จะวัดระยะผ่านการสัมผัสวัตถุโดยตรง จึงให้ความแม่นยำในการวัดที่เหนือกว่าเมื่อเปรียบเทียบกับเซนเซอร์แบบไร้สัมผัส แต่ก็มีระยะการใช้งานที่สั้นกว่า เซนเซอร์ชนิดนี้มีหลายรูปแบบให้เลือกใช้ขึ้นอยู่กับเงื่อนไขการทำงาน และวัตถุที่ต้องการวัด
- เซนเซอร์สัมผัสวัตถุที่ทำงานโดยอาศัยการเปลี่ยนแปลงค่าความเหนี่ยวนำตามตำแหน่งการเคลื่อนที่
- เซนเซอร์สัมผัสวัตถุที่ใช้หลักการตรวจจับแม่เหล็ก
สรุป
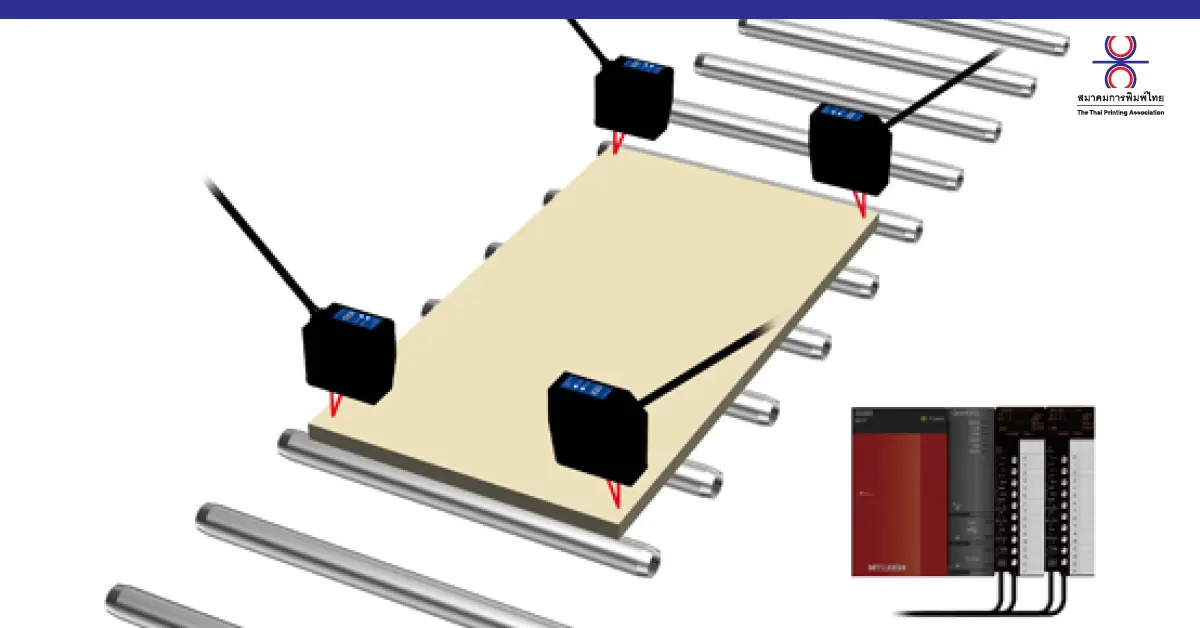
ในการผลิตแบบอัตโนมัติ สินค้าหรือชิ้นส่วนจะถูกป้อนเข้าโดยอัตโนมัติด้วยเช่นกัน การตรวจสอบความเรียบร้อยของชิ้นงานเข้าจะมีความสำคัญมาก มีการนำเซนเซอร์ที่มีการใช้ในอุตสาหกรรมต่าง ๆ มากมายและสามารถพบได้รอบตัวเรา
Displacement sensor นับเป็นอีกเทคโนโลยีที่มีการทำงานทรงประสิทธิภาพ สามารถตรวจจับระยะทางและขนาดชิ้นงานแบบไม่สัมผัสกับวัตถุ วัดได้แม้แต่วัตถุที่มีรูปทรงที่ซับซ้อนและมีขนาดเล็ก เหมาะสำหรับการใช้งานการตรวจสอบชิ้นงานขนาดเล็ก วัดความหนาบาง วัดการแอ่นตัว ให้ความสเถียรในการวัดโดยที่ไม่ได้รับผลกระทบจากแสงโดยรอบหรือแสงที่กระจาย และตอบโจทย์การทำงานในการลดข้อผิดพลาดในไลน์การผลิต
5. Ultrasonic Sensor
ประวัติของ Ultrasonic sensor
ย้อนกลับไปในปี 1790 เมื่อ Lazzaro Spallanzani นักธรรมชาติวิทยาชาวอิตาเลี่ยน ได้ค้นพบเป็นครั้งแรกว่าค้างคาวบินโดยใช้คลื่นความถี่สูงหรือคลื่น Ultrasonic ในการบอกทิศทางซึ่งไม่ได้ใช้สายตาในการบอกทิศทางอย่างที่เข้าใจมาแต่โบราณ และต่อมาในปี 1826 Jean-Daniel Colladon นักฟิสิกส์ชาวสวิส ประสบความสำเร็จในการหาความเร็วเสียงในน้ำได้ โดยใช้คลื่นความถี่สูง Ultrasonic จากการใช้กระดิ่งใต้น้ำ ซึ่งถือเป็นอีกเหตุการณ์ที่มีการการใช้คลื่น Ultrasonic ถัดมาในปี 1881 Pierre Curie’s นักฟิสิกส์ชาวฝรั่งเศสได้ทำการทดลองและค้นพบความสัมพันธ์ระหว่างแรงดันไฟฟ้าและความดันบนผลึก เรียกว่า “ปิแอร์โซอิเล็กทริซิตี้ (Pierre so Electricity)” เขาได้ค้นพบเพิ่มเติมว่าถ้ามีการเพิ่มแรงดันไฟฟ้าให้มากขึ้นจะทำให้ผิวผลึกเกิดการสั่นสะเทือนและเกิดคลื่นความถี่สูง Ultrasonic ด้วยหลักการและทฤษฎีนี้ จึงเป็นจุดเริ่มต้นของการพัฒนามาเป็น Ultrasonic sensor เพื่อใช้วัดระดับที่ถูกใช้กันอย่างแพร่หลายในปัจจุบัน
จุดประสงค์ของ Ultrasonic sensor
จุดประสงค์การใช้งาน Ultrasonic sensor นั้น ถูกแบ่งออกเป็น 2 ลักษณะการใช้งานหลัก ๆ คือ
- ใช้เพื่องานตรวจสอบ (Monitoring) และดูผลลัพธ์ของข้อมูล เช่น ใช้แสดงผลของระดับน้ำในถัง, แสดงผลปริมาณข้าวเปลือกใน Silo หรือ ระดับน้ำแม่น้ำ เป็นต้น
- ใช้เพื่อการควบคุม (Control) อะไรบางอย่าง ยกตัวอย่างเช่น การควบคุมระดับสารเคมีในถังให้อยู่ในระดับที่ต้องการตลอดเวลา เป็นต้น
หลักการทำงานของ Ultrasonic sensor
เซ็นเซอร์วัดระดับ (Level sensor) ประเภท Ultrasonic หรือ Ultrasonic sensor เป็นเซ็นเซอร์ที่ต้องอาศัยหลักการของการสะท้อนคลื่นความถี่ Ultrasonic ในการตรวจจับวัตถุต่าง ๆ Ultrasonic sensor นั้นจำเป็นต้องอาศัยตัวกลางในการเดินทาง เช่น อากาศ แก๊ส หรือของเหลว จึงทำให้ Ultrasonic sensor สามารถใช้งานตรวจจับวัตุได้หลากหลายชนิด ซึ่งวัตถุที่มีสถานะของเหลวโดยที่เป็นสารเคมีหรือมีความหนืดก็สามารถใช้ Ultrasonic sensor ในการตรวจจับได้ และ Ultrasonic sensor มีความถี่ไปตั้งแต่ 20000Hz ขึ้นไปซึ่งเป็นความถี่ที่สูงเกินกว่ามนุษย์จะสามารถรับรู้ได้ โดยการคำนวณหาระยะของคลื่น Ultrasonic จะเป็นไปตามสูตรการเคลื่อนที่แนวราบดังนี้

โดยที่ S = ระยะทาง (m)
Vเสียง = ความเร็วเสียง (m/s)
t = เวลาในการเดินทางของคลื่น Ultrasonic ทั้งขาไป-ขากลับ (s)
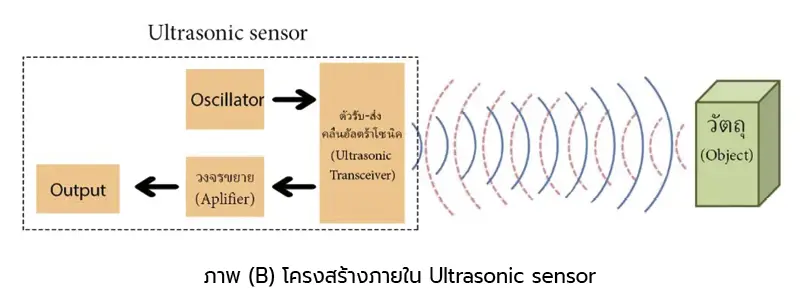
การทำงานภายใน Ultrasonic sensor
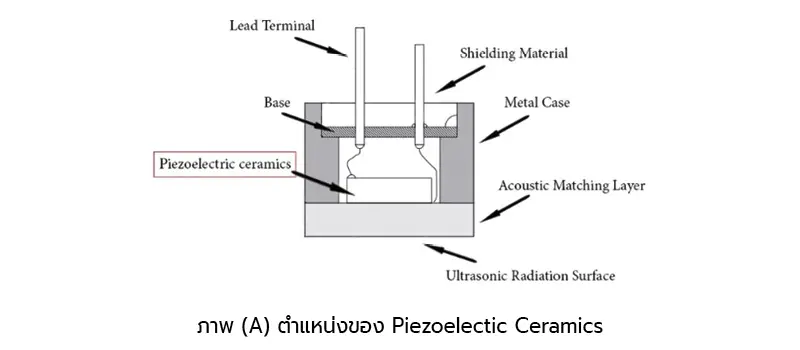
ในการทำงานของ Ultrasonic sensor จะมีส่วนประกอบสำคัญที่มีสัมพันธ์กัน ซึ่งแต่ละอุปกรณ์นั้นจะมีหน้าที่แตกต่างกัน ส่วนแรกคือวงจรกำเนิดสัญญาณความถี่ (Oscillator) จะเป็นวงจรอิเล็กทรอนิกส์ที่ผลิตสัญญาณออกมาซ้ำ ๆ กันคือ ความถี่สั่นพ้อง (resonance) และถูกส่งไปยัง Piezoelectic Ceramics ดังภาพ (A) เพื่อให้เกิดการสั่นเท่ากับความถี่ธรรมชาติของ Piezoelectic Ceramics ส่งผลทำให้เกิดค่าแอมพลิจูดสูงสุดเท่าที่จะสามารถเกิดขึ้นได้ และส่งคลื่น Ultrasonic ออกไป
จากนั้นเมื่อวงจรกำเนิดสัญญาณความถี่ (Oscillator) สร้างสัญญาณขึ้นมา จะถูกส่งไปยัง Ultrasonic Transceiver ดังภาพ (B) จะทำหน้าที่แปลงสัญญาณที่ได้จาก Oscillator ในรูปแบบแรงดันไฟฟ้าไปเป็นคลื่น Ultrasonic และส่งออกไปยังวัตถุที่ต้องการตรวจจับหรือวัดระดับ และ Ultrasonic Transceiver ยังทำหน้าที่เป็นตัวรับคลื่น Ultrasonic ที่สะท้อนกลับมาจากวัตถุและแปลงเป็นสัญญาณแรงดันไฟฟ้าเพื่อนำไปใช้งานต่อไป ซึ่งหลังจาก Ultrasonic Transceiver ได้รับคลื่น Ultrasonic ที่สะท้อนมาจากวัตถุ จะแปลงเป็นแรงดันไฟฟ้าแต่มีขนาดเล็ก ดังนั้นแล้วจึงต้องขยายสัญญาณแรงดันไฟฟ้าด้วย Amplifier ดังภาพ (B) ก่อนที่จะนำไปใช้งาน และในกระบวนการสุดท้ายของ Ultrasonic sensor สัญญาณที่ถูกขยายจาก Amplifier จะถูกส่งเข้ามามาที่วงจร output ดังภาพ (B) เพื่อแปลงเป็นสัญญาณมาตรฐานเช่น 4-20mA, 0-10V หรืออื่น ๆ และนำสัญญาณเหล่านี้ไปเชื่อมต่อกับอุปกรณ์ภายนอกอีกที เช่น PLC, indicator, Controller, Relay หรือตัวควบคุมอื่น ๆ
ประเภทวงจร output
วงจร output ของ Ultrasonic sensor จะมีอยู่ด้วยกัน 3 ประเภท ดังนี้
- วงจร output แบบไม่ต่อเนื่อง (Discrete Output)
ทำงานแบบเปิดปิดเหมาะกับการตรวจจับวัตถุภายในถังเก็บเป็นจุด (ตรวจสอบภายในถังเก็บว่ามีปริมารมาก น้อย หรือไม่มี) - วงจร output แบบต่อเนื่อง (Continuous Output)
จะมี output เป็น Analog Output สัญญาณแรงดันไฟฟ้าหรือกระแสไฟฟ้ามาตราฐาน เช่น 4-20mA, 0-10V เป็นต้น เหมาะกับกับการตรวจจับที่อยากทราบตำแหน่ง ระยะทาง เช่น ระดับน้ำภายในถังเก็บ - วงจร output สำหรับส่งข้อมูล (Communication Data Output)
จะทำงานคล้ายวงจร output แบบต่อเนื่อง แต่แตกต่างกับที่สัญญาณที่ส่งออกมาเป็นสัญญาณดิจิตอล เช่น IO Link, CC Link, PROFIBUS ที่ใช้สื่อสารกับอุปกรณ์พิเศษ เช่น PLC
ปัจจัยที่ส่งผลต่อประสิทธิภาพของ Ultrasonic sensor
- ระยะจำกัดของการตรวจจับ (Blind zone)
Ultrasonic sensor จะมีระยะจำกัดของการตรวจจับอยู่ ซึ่งจะทำให้เซนเซอร์ตรวจจับไม่ได้โดยสามารถดูค่า Blind zone ของ Ultrasonic sensor จากคู่มือของตัวเซนเซอร์ เช่น Ultrasonic sensor รุ่น UD800 จะมี Blind zone อยู่ที่ 0.4 ถึง 1.8 เมตร - ผลกระทบด้านอุณหภูมิ (Effect of Temperature)
อุณหภูมิจะส่งผลของคลื่น Ultrasonic ดังนั้นในการใช้งานของ Ultrasonic sensor จะต้องมีอุณหภูมิที่เหมาะสม เช่น Ultrasonic sensor รุ่น UD800 มีช่วงการใช้งานอุณหภูมิอยู่ที่ 0°c ถึง 80°c และ Ultrasonic sensor รุ่น UD800 นั้นมีการชดเชยอุณหภูมิภายใน ซึ่งจะช่วยเพิ่มความแม่นยำ - มุมตกกระทบวัตถุภายใน
การใช้งานของ Ultrasonic sensor ได้ดีที่สุดนั้นวัตถุที่กระทบต้องมีลักษณะตั้งฉากกับ Ultrasonic sensor ดังนั้นแล้วถ้ามุมของวัตถุมีองศาเพิ่มขึ้นจะทำให้ประสิทธิภาพของการใช้งาน Ultrasonic sensor ลดลง โดยส่วนใหญ่มุมของวัตถุนั้นจะต้องมีค่าเอียงน้อยกว่า 10 องศา และวัตถุที่จะทำการสะท้อนจากคลื่น Ultrasonic ควรจะมีลักษณะเป็นแนวราบ เพื่อให้ได้ประสิทธิภาพในการตรวจจับดีที่สุด ถ้าวัตถุที่ทำการตรวจจับเป็นชิ้นเล็ก ๆ หรือมีรูปร่างที่ไม่แน่นอน จะทำให้ความแม่นยำลดลง - ตำแหน่งการติดตั้งของ Ultrasonic sensor ที่เหมาะสม
การติดตั้งของ Ultrasonic sensor นั้นจะส่งผลต่อการวัดค่าและความแม่นยำ ดังนั้นตำแหน่งของการติดตั้ง Ultrasonic sensor จะมี 4 ประเภทดังนี้- 4.1 การติดตั้ง Ultrasonic Sensor บริเวณที่โดนแสงแดด
การติดตั้ง Ultrasnic Sensor ควรมีอุปกรณ์ป้องกันเซ็นเซอร์ที่จะได้รับความเสียหายจากความร้อน ซึ่งจะส่งต่อความแม่นยำ - 4.2 การติดตั้ง Ultrasonic ในกรณีที่มีการเติมวัตถุ เข้าไปในถังแบบอาศัยแรงโน้มถ่วงของโลก
จุดที่เหมาะกับการติดตั้ง Ultrasonic Sensor นั้นควรอยู่ให้ห่างจากจุดเติม เพื่อป้องกันการทำงานผิดพลาดหรือความเสียหายแก่ตัวเซ็นเซอร์ - 4.3 การติดตั้ง Ultrasonic ในกรณีที่มีการปล่อยของออกด้านล่างตรงจุดกลางของถัง
ควรดูค่ามุมส่งสัญญาณ (Emission Angle) ของ Ultrasonic sensor เพื่อให้การวัดมีความแม่นยำที่สุด - 4.4 การติดตั้ง Ultrasonic ที่มี อุปกรณ์ประเภท Pneumatic Equipment
Pneumatic Equipment จะสามารถรบกวนการส่งคลื่น Ultrasonic ได้ซึ่งจะทำให้ Ultrasonic sensor มีความแม่นยำลดลง ดังนั้นไม่ควรติดตั้ง Ultrasonic sensor ใกล้กับจุดที่โดนลม
- 4.1 การติดตั้ง Ultrasonic Sensor บริเวณที่โดนแสงแดด
- วัสดุที่ใช้ทำ Ultrasonic Sensor
เนื่องจากตัว Ultrasonic Sensor ที่ใช้ในกระบวนการผลิตนั้นมีโอกาสที่ต้องสัมผัสกับสารเคมี มีการกัดกร่อน หรือต้องทนอุณหภูมิสูง ดังนั้นควรจะเลือกวัสดุที่ใช้ทำ Ultrasonic Sensor ที่เหมาะสมกับงานที่ใช้ เช่น Ultrasonic Sensor รุ่น UD800 มีมาตรฐานการป้องกันฝุ่นและน้ำที่ IP68 (เซ็นเซอร์) และ IP65 (อุปกรณ์) โดยวัสดุที่ใช้อยู่บ่อย ๆ ได้แก่ PP, PVDF, PTFE, stainless steel หรือ foam faced transducer เป็นต้น
อ่านต่อฉบับหน้า…